Já sem se snažil v jednom z mých předchozích dílů popsat poměrně známý systém 2K12 Kub, čili systém středního dosahu PVO PV a důvody a podmínky jeho vzniku. Je patrno, jaký byl jeho úkol a jakou měl úlohu ve struktuře Sovětské vojskové PVO. Podobně jako při popisu systémů S-300, tak tady je potřeba si říct, že 2K12 Kub, jako předchůdce dnešního dílu, měl omezení. Ta vycházela z možnosti doby jeho vzniku, i z taktiky. Předně, 2K12 Kub, byl systém na úrovni divize pozemních vojsk, přednostně byl určen do formace tankových divizí RA (ale jeho přítomnost v motostřeleckých svazcích je asi dost častá). Měl tedy za úkol pokrýt vzdušný prostor nad bojujícími svazky divize a dá se říct, že k tomu měl dobré předpoklady. Byl mobilní, na podvozcích s vysokou průchodivostí, ve svazku pluku PVO, ale i v podobě samostatných baterií byl schopen úkoly plnit samostatně, od vyhledání cíle, až po jeho napadení. Byla použita, jak jsme si řekli poprvé u PVO PV v Sovětském svazu, poloaktivní radiolokační naváděcí soustava, což bylo vysoko hodnoceno a plně to odpovídalo požadavkům. Ne vše ale bylo ideální. Jednak to byla malá minimální výšková hranice postřelování cíle, především z počátku, ale v podstatě do konce vývoje šel podlétnout. Jednak to byla malá kapacita, mohl postřelovat jeden cíl součastně na baterii, což bylo 5 cílů na pluk, respektive na divizi PV, to bylo málo, především s nástupem moderního frontového letectva. A jednak to byla závislost na jednom vozidle, totiž na RL vyhledávání cíle a součastně RL navádění ŘS na vozidle 1S91. V případě vyřazení tohoto vozidla byl systém v podstatě nebojeschopný.
Těchto problémů si bylo velení armády i konstruktéři vědomi, ale odstranit tyto neduhy bylo možné, až po ovládnutí technologií, které to umožní.
K rozhodnutí o vývoji následovníka systému 2K12 Kub, bylo rozhodnuto velmi brzy a v podstatě po pěti letech od jeho zavedení do výzbroje a ještě před přijetím první modernizované varianty 2K12M1 Kub M1, bylo vydáno oficielní zadání pro systém následující generace. Toto zadání vyšlo obvyklým výnosem vlády, tedy SM SSSR a ÚV KSSS dne 13.ledna 1972. To samé nařízení udávalo i vznik námořní verze systému. Měl vzniknout prostředek středního dosahu určený na postřelování cílů na nízkých a středních výškách do vzdálenosti 30km, manévrujících s přetížením 10G a do rychlosti 800m/s. To byly v podstatě všechny cíle, pohybující se v prostoru válčiště. Ve výhledu měl být schopen postřelovat i taktické balistické rakety protivníka.
Vývojem systému byl pověřen v podstatě ten samý tým, jako v případě předchůdce. Bylo to tedy bývalé OKB-15, v době které se věnujeme je to NIIP (výzkumný ústav přístrojové výroby (priborostroenija)) nesoucí jméno Viktora Vasileviče Tichomirova, který patřil od 22.12.1969 pod NKO Fazotron. Součástí tohoto koncernu pod vedením V.K.Grišina byl po celou dobu vývoje který si budeme popisovat, později ale, od roku 1991 je opět samostatný NIIP a v součastné době pokračuje vývoj systémů PVO, ale i přístrojového vybavení letadel a v součastné době v něm vznikají komponenty Ruského letounu 5. generace. Jak jsme si řekli minule, má na co navazovat a krom minule jmenovaného, později patří mezi výsledky závodu např. naváděcí soustavy ŘS R-27, R-77, R-73, radiolokátoru Zaslon Migu-31…..
První generální konstruktér NIIP (vlevo)
Виктор Васильевич Тихомиров
Viktor Vasilevič Tichomirov
Hlavní konstruktér systému 9K37 (vpravo)
Ардалион Ардалионович Растов
Ardalion Ardalionovič Rastov


Hlavním konstruktérem systému 9K37 byl jmenován Ardalion Ardalionovič Rastov. O něm jsem se zmínil v souvislosti s vývojem naváděcí soustavy rakety 3M9 systému 2K12 Kub. Teď byl hlavním konstruktérem a hlavičku samonavádění 9E50 konstruoval I.G.Akopjan, práce na velitelském stanovišti G.N.Valaev, a RL OZ V.V.Matjašev.
Odpalovací zařízení opět vyvíjelo bývalé Sverdlovské SKB-203, teď už MKB Start pod vedením A.I.Jaskina. O něm padla zmínka i v souvislosti se systémem S-300V. Potud jde o stejné složení, které se předtím podílelo na vývoji systému
2K12 Kub, Ale tentokrát k raketě sáhli jinam, vývojem ŘS 9M38 byl pověřen Lev Venniaminovič Ljulev, respektive jeho CMKB Novator. Tuto konstrukční kancelář jsme si představili blíže v článku věnovaném systému S-300V.
Přehledový radiolokátor 9S18 pocházel z dílny Novosibiřského NII měřících systémů (NIIIP), čili opět podobně jako u S-300 a jeho hlavním konstruktérem byl A.P.Vetoško.
Ukončení vývoje jednotlivých prvků systému bylo naplánováno na polovinu roku 1975.
Než se začnu věnovat poměrně složitému vývoji, chtěl bych se zmínit o dvou věcech.
Jednak je to přehledový radiolokátor 9S18 Kupol, který v systému slouží jako hlavní zdroj informací o cílech. Jeho vývoj jde trošičku mimo vývoj systému 9K37 Buk, jak si ho budeme popisovat. On totiž sloužil dříve a jeho vývoj vznikl jako požadavek nahradit již dosluhující RL P-40 a i jiné, které sloužily jako přehledové radiolokátory na úrovni divize PVO a i výše. Jde tedy o prostředek, který byl od počátku vyvíjen jako univerzální.
Druhou věcí je ŘS, kterou popíšu zvlášť. Je třeba se zmínit předem o tom, že rozhodnutí použít jinou ŘS, respektive jiný princip pohonu byl ten, že raketa 3M9 díky pohonu pomocí náporového motoru na TPH nebyla vhodná jednak k manévrovému boji a jednak k vysoké rychlosti, což byl požadavek a jednak měla po vyhoření motoru velký aerodynamický odpor, čili nebyla moc vhodná na lety na pasivní části letu. Rakety s tímto druhem pohonu byly důsledek vývoje raket na TPH, ale v době kdy vznikala nová 9M38, už to problém nebyl. Je ale nutno říct, že rakety s náporovými motory i na TPH se v Sovětském svazu uplatňovaly dál, především u námořních ale i leteckých ŘS a tam dokáží uplatnit své výhody, jako je dlouhá doba chodu motoru a není požadována vyšší rychlost.
Takže teď k vývoji. Od počátku bylo jasné, že systém bude navazovat na svého předchůdce, zůstane podobná naváděcí soustava ŘS, výkony se zvednou, bude nutná schopnost postřelovat nízkoletící cíle a bude nutné systém vyvíjet jako vícekanálový. Vývoj tedy běžel, ale velení Sovětských ozbrojených sil, si bylo vědomo problémů systému Kub a proto brzy po zadání vznikl nový požadavek. My už jsme si něco podobného popsaly u systémů S-300V a 9K38 Igla, totiž urychlit vývoj rozdělením na dvě postupná vývojová stádia. 22.května 1974 vyšel nový výnos vlády a strany a na jeho základě mělo dojít k modernizaci systému Kub za pomocí prvků systému nového tak, aby byly rozšířeny jeho schopnosti. Měl tedy vzniknout kombinovaný systém, který za relativně malých nákladů povýší 2K12 Kub a zároveň bude dál, v původních termínech probíhat vývoj 9K37. Termín byl zahájit společné zkoušky v září 1974.
Byla zvolena zajímavá cesta, která vytvořila poté ve výsledku téměř dokonalé prolnutí mezi Kubem a budoucím Bukem. Do stávající baterie systému 2K12M3 Kub M3 ve složení RL vyhledávání cíle a navádění ŘS 1S91M3 a čtyř OZ 2P25M3 které používaly ŘS 9M9M2 bylo doplněno nové OZ 9A38, které mohlo používat jak stávající ŘS tak nové, v té době ještě vyvíjené 9M38. Jelikož vozidlo 9A38 mělo RL 9S35, určený k nasvícení cíle a navádění ŘS, bylo docíleno schopnosti systému postřelovat součastně dva cíle na baterii, čili 10 cílů na pluku PVO. Zároveň se zvedl počet OZ na pět a množství ŘS v palebném postavení na 15 u baterie.
Od srpna 1975 do října 1976 prodělal komplex státní zkoušky na polygonu v Erbe a v roce 1978 byl schválen do výzbroje armády jako 2K12M4 Kub M4 jelikož se jednalo o doplnění stávajícího systému o nové prostředky, ale lze se setkat i z označením 9K37-1 Buk-1 pod kterým byl vyvíjen, jako první úroveň nového systému.
V průběhu zkoušek bylo zjištěno, že toto opatření je velmi efektivní a že výkony nového OZ s radarem 9S35 jsou velmi dobré. Samostatné OZ 9A38 dokázalo v režimu vyhledávání cíle zjistit cíl na větší vzdálenost, než přehledový RL 1S91M2 (cíl na výšce 3000m 65-77km proti 44km a cíl na výšce 30-100m na vzdálenost 32-41km proti 31-28km) Čas od okamžiku zjištění cíle do startu ŘS byl v případě samostatné činnosti 9A38 24-27 sekund. V případě, že byla použita ŘS 9M38, výrazně se také zvedly výkony, minimální výška dosahu a pravděpodobnost zničení cíle. Ovšem podle mého názoru je nepravděpodobné, že systém běžně raketu 9M38 používal. Myslím si, že běžnou municí byla 3M9M3, jelikož ta byla běžně ve výzbroji systému 2K12M3 Kub M3 a byly jich asi plné sklady.
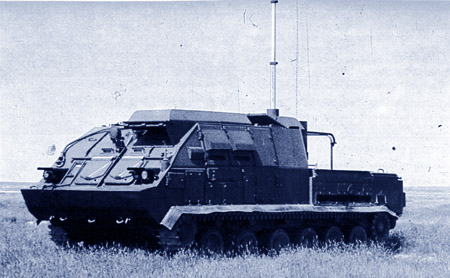
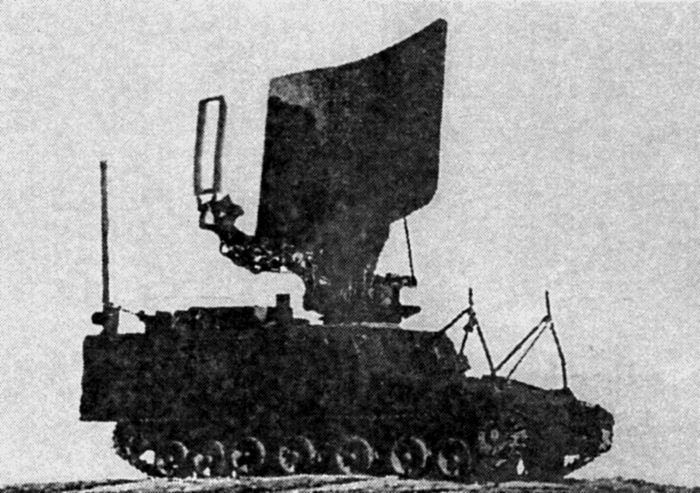
Novým prostředkem systému tedy bylo OZ 9A38. Toto vozidlo o hmotnosti 34t a s osádkou čtyř mužů bylo na novém podvozku GM-569. Anténa RL 9S35 byla pod velkým dielektrickým krytem na přídi otočné věže, jejíž součástí byla lafeta se třemi ŘS 3M9M3, případně 9M38. Mohlo pracovat jak v autonomním režimu vyhledávání cílů, tak ve společném, kdy cíle přebíralo z přehledového RL na 1S91M3. Pomocí komunikace bylo k vozidlu připojeno jedno stávající OZ 2P25M3, ze kterého mohly být odpalovány ŘS a naváděny pomocí RL na 9A38. Vozidlo bylo také vybaveno televizní kamerou, která mohla sloužit k zaměření cíle v případě intenzivního aktivního rušení, znemožňujícího zaměření cíle radiolokátorem. Ve výbavě byly také komunikační prostředky, identifikátor cíle vlastní-cizí a navigační systém.
RL 9S35 pracoval v centimetrovém pásmu buď v režimu vyhledávání cíle, pak pracovala jako impulsní a sektor o horizontálním úhlu 120° a ve vertikále 6-7° prohledal za 4 sekundy, v případě že cíl byl předán z přehledového RL pak doba jeho nalezení nepřesáhne 2 sekundy. Po zaměření cíle byl cíl nasvícen druhým vysílačem pracujícím na táhlé vlně a po zaměření cíle naváděcí soustavou ŘS následoval start. Přesnost zjištění cíle byla 175m v dálce, -20/+10m/s v rychlosti a 0,5dílku v úhlu.

9M38 je 685kg těžká a 5,5m dlouhá jednostupňová ŘS na TPH. Jako pohon slouží motor se dvěma jádry, startovací o velkém výkonu a malé délce tahu a letový. Celková doba hoření je cca 15 sekund. Aerodynamická koncepce je podobná jako u amerických ŘS Standard, čili dlouhé štíhlé stabilizátory ve střední části délky rakety a čtyři řídící plochy v zadní části ve společné ose ze stabilizátory. Důvod vzniku této koncepce je pravděpodobně z důvodu dlouhého letu na pasivní části dráhy a požadavek na manévrovací schopnosti. Maximální rychlost ŘS je 1000m/s. Naváděcí soustava je poloaktivní radiolokační, systém řízení je vývojovým stupněm rakety 3M9. naváděcí hlavička je nová 9E50 a nová je elektronická výbava včetně přibližovacího zapalovače. Výškový dosah byl 25-18000m, dálkový 3,5-25km. Maximální přetížení za letu byl 19G. Tříštivá bojová část měla hmotnost 70kg. Přibližovací zapalovač inicializuje bojovou část ve vzdálenosti 17m od cíle a v případě jeho minutí dojde k samolikvidaci ŘS.
Byla to v té době už asi poslední ŘS protiletadlového systému která nebyla přepravována a odpalována z kontejneru, zavěšovala se na startovací lištu OZ podobně, teda stejně jako její předchůdce. Důvod proč není podobně jako všechny moderní střely odpalována z kontejneru je dost možná související s potřenou zpětné komptability OZ, případně ze způsobem navedení, kdy hlavička zachycuje cíl ještě před startem na OZ. Raketa je přesto od výrobce dodávána v hermeticky uzavřeném kontejneru 9Ja266 a po dobu 10ti let nevyžaduje žádnou údržbu a kontrolu.
Všechny ŘS spojené se systémem pohromadě 9K317, 9K38 a vzadu pak 3M9M systému Kub
Vedle pak náladovka z Finska. ŘS a kontejnery v kterých jsou skladovány.